Electronic Design
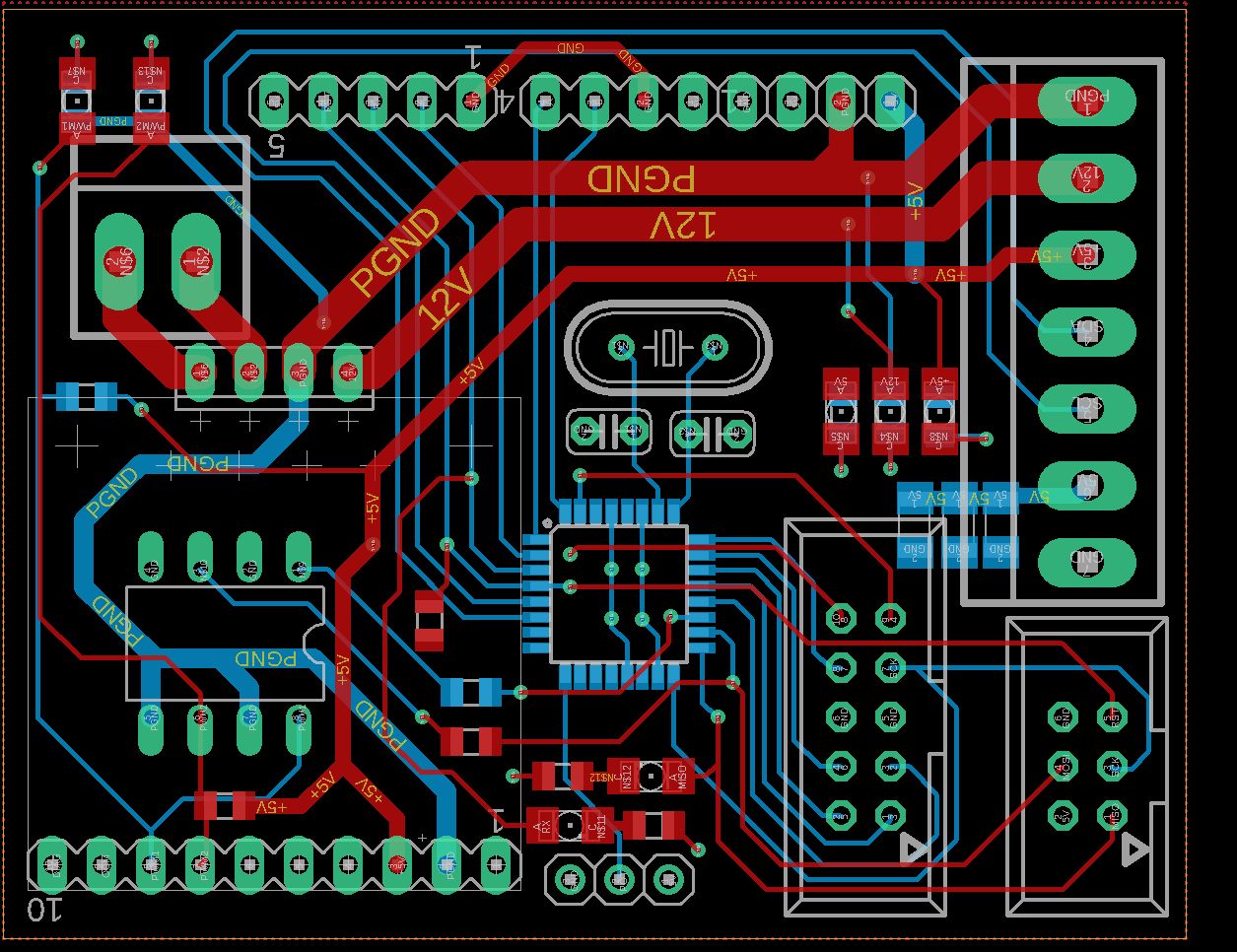
Considering the operating frequency and number of pins, ATmega328P was the choice for microcontroller. G2 24v13 Motor driver form Pololu was chosen for this application. Circuit and PCB design was done in Autodesk Eagle Software considering peripherals for serial and SPI programming, Encoders, I2C for daisy chaining of motor drivers.
github link for PCB layout and code